





- Guaranteed Secure Payments on Every Order
- Refund if your item is not delivered or as described
- Buyer Protection after order confirmation
- Size: 10CBM
- Place of Origin: Japan
- Brand Name: HAOYU
- Model Number: BA006N
- Weight: 150.000 kg
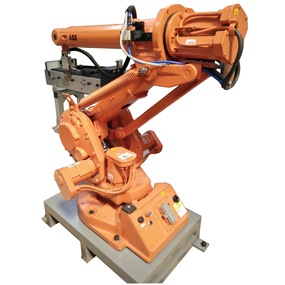
Mini Robot Arm Smallest Robot Arm for Industry
1. Payload: 6KG with the highest wrist moments and inertial in its class.
2. Reach: 1445mm
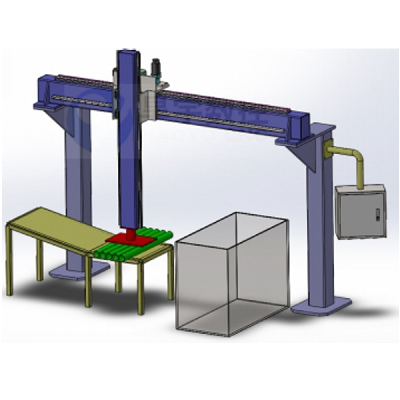
3. The project is composed of workpiece transporting device, air channel system, control system, 2KVA transformer, etc.
arm robot, automatic welding machine, argon welding machine, welding robot, welding machine, pipe welding machine, industrial robot arm, robotic welding machine, robot arm, Steel Pipe Welding Machine, Circumferential Seam Welding, Seam Welding, girth welding machine, Tank welding machine, welding automation with ARC WELDING ROBOTIC ARM, Automatic MIG girth seam welding robot for tank and air compressor, aluminum orbital pipe tube welding robot machines manipulator with robotic arm, cnc beam steel submerged arc welding machine to weld pipe and flange, automatic TIG Longitudinal girth Circular circumferential Straight seam robotic welder welding machines for welding tank or round tubes, seam welders products suppliers, manufacturers and exporters on Alibaba.com stitch welders, gantry type pipe handling robot welding machine manufacturers china for steel pipe handling and packing, Scaffolding circular seam automatic welding machine, Scaffolding Automatic Welding Machine, Carbon steel Scaffolding Ringlock Ledger Welding Machine, Pipe handling Robot, gantry robot for steel pipe handling packing, pipe welding manipulator with robotic arm, gantry type robot welding machine manufacturers china, arm robot, automatic welding machine, argon welding machine, pipe cutting machine, welding robot, welding machine, pipe welding machine, industrial robot arm, robotic welding machine, robot arm, Steel Pipe Welding Machine, Circumferential Seam Welding, Seam Welding, girth welding machine, Tank welding machine,Seam welders,automatic welding machine,steel pipe welding machine,cnc welding machine,straight seam welding machine,seam welding machine,stainless steel welding machine,automatic welding machine prices,pipe flange welding machine,pipe welding machine,tube welding machine,seam welder,auto welding machine,robotic arm,industrial welding robot,water tank welding machine
Robotic Manipulator Application
1. The solution for machine tending, material handling, assembly, picking and packing, material removal, testing and sampling, dispensing, etc.
Technical Parameter
Degrees of freedom | 6 axes | |
Payload | 6 kg | |
Reach | 1445mm | |
Welding linear speed | 3-10 mm/s | |
Repeatability | ±0.05mm | |
Diameter of solid wire | φ1.2mm | |
Welding current | 350A | |
Shielding gas | CO2 | |
Sensor | OMRON | |
Welding source | 2sets×MEGMEET (CM-350) | |
Motion Range | Arm rotation (JT1) | ±165° |
Arm out-in (JT2) | ±150°~-90° | |
Arm up-down (JT3) | ﹢45°~﹣175° | |
Wrist swivel (JT4) | ±180° | |
Wrist bend (JT5) | ±135° | |
Wrist twist (JT6) | ±360° | |
Max speed | Arm rotation (JT1) | 240°/s |
Arm out-in (JT2) | 240°/s | |
Arm up-down (JT3) | 220°/s | |
Wrist swivel (JT4) | 430°/s | |
Wrist bend (JT5) | 430°/s | |
Wrist twist (JT6) | 650°/s | |
Moment (N*m) | Wrist swivel (JT4) | 12 |
Wrist bend (JT5) | 12 | |
Wrist twist (JT6) | 3.75 | |
Moment of inertia (kg*m2) | Wrist swivel (JT4) | 0.4 |
Wrist bend (JT5) | 0.4 | |
Wrist twist (JT6) | 0.07 | |
Power Requirements*2 | 2KVA | |


- Size: 10CBM
- Place of Origin: Japan
- Brand Name: HAOYU
- Model Number: BA006N
- Weight: 150.000 kg
Degrees of freedom | 6 axes | |
Payload | 6 kg | |
Reach | 1445mm | |
Welding linear speed | 3-10 mm/s | |
Repeatability | ±0.05mm | |
Diameter of solid wire | φ1.2mm | |
Welding current | 350A | |
Shielding gas | CO2 | |
Sensor | OMRON | |
Welding source | 2sets×MEGMEET (CM-350) | |
Motion Range | Arm rotation (JT1) | ±165° |
Arm out-in (JT2) | ±150°~-90° | |
Arm up-down (JT3) | ﹢45°~﹣175° | |
Wrist swivel (JT4) | ±180° | |
Wrist bend (JT5) | ±135° | |
Wrist twist (JT6) | ±360° | |
Max speed | Arm rotation (JT1) | 240°/s |
Arm out-in (JT2) | 240°/s | |
Arm up-down (JT3) | 220°/s | |
Wrist swivel (JT4) | 430°/s | |
Wrist bend (JT5) | 430°/s | |
Wrist twist (JT6) | 650°/s | |
Moment (N*m) | Wrist swivel (JT4) | 12 |
Wrist bend (JT5) | 12 | |
Wrist twist (JT6) | 3.75 | |
Moment of inertia (kg*m2) | Wrist swivel (JT4) | 0.4 |
Wrist bend (JT5) | 0.4 | |
Wrist twist (JT6) | 0.07 | |
Power Requirements*2 | 2KVA | |